શિકારી-શિકાર મોડેલ અને ગુડવિન મેક્રો ઇકોનોમિક મોડેલ
એક શિકારી-શિકાર જૈવિક મોડેલને ધ્યાનમાં લો જેમાં એક પ્રજાતિ બીજી પ્રજાતિ માટે ખોરાક પૂરો પાડે છે. આ મોડેલ, જે લાંબા સમયથી ક્લાસિક બની ગયું છે, તે 20 મી સદીના પહેલા ભાગમાં બનાવવામાં આવ્યું હતું. એડ્રિયાટિક સમુદ્રમાં માછલી પકડવામાં વધઘટ સમજાવવા ઇટાલિયન ગણિતશાસ્ત્રી વી. વોલ્ટેરા. મોડેલ ધારે છે કે જ્યાં સુધી તેઓ પાસે પૂરતો ખોરાક ન હોય ત્યાં સુધી શિકારીની સંખ્યામાં વધારો થાય છે, અને શિકારીની સંખ્યામાં વધારો શિકાર માછલીની વસ્તીમાં ઘટાડો તરફ દોરી જાય છે. જ્યારે બાદમાં દુર્લભ બને છે, ત્યારે શિકારીની સંખ્યામાં ઘટાડો થાય છે. પરિણામે, ચોક્કસ ક્ષણથી શિકારની માછલીઓની સંખ્યામાં વધારો થવાનું શરૂ થાય છે, જે થોડા સમય પછી શિકારીની વસ્તીમાં વધારો કરે છે. ચક્ર પૂર્ણ થયું.
દો Nx(t)અને N 2 (t) -આપેલ સમયે શિકાર માછલી અને શિકારી માછલીઓની સંખ્યા tઅનુક્રમે ચાલો માની લઈએ કે શિકારીની ગેરહાજરીમાં શિકારની સંખ્યામાં વધારો થવાનો દર સતત છે, એટલે કે.
જ્યાં A -હકારાત્મક સતત.
શિકારીના દેખાવથી શિકારના વિકાસ દરમાં ઘટાડો થવો જોઈએ. અમે ધારીશું કે આ ઘટાડો રેખીય રીતે શિકારીની સંખ્યા પર આધારિત છે: કરતાં વધુ શિકારી, પીડિતોનો વિકાસ દર ઓછો. પછી

જ્યાં t > 0.
તેથી, શિકાર માછલીની સંખ્યાની ગતિશીલતા માટે આપણે મેળવીએ છીએ:
ચાલો હવે એક સમીકરણ બનાવીએ જે શિકારીની વસ્તીની ગતિશીલતા નક્કી કરે છે. ચાલો ધારીએ કે તેમની સંખ્યા, શિકારની ગેરહાજરીમાં, સતત દરે (ખોરાકની અછતને કારણે) ઘટે છે. bએટલે કે
![]()
શિકારની હાજરીથી શિકારીના વિકાસ દરમાં વધારો થાય છે. ચાલો ધારીએ કે આ વધારો રેખીય છે, એટલે કે.
![]()
જ્યાં n> 0.
પછી શિકારી માછલીના વિકાસ દર માટે આપણે નીચેના સમીકરણ મેળવીએ છીએ:
"શિકારી-શિકાર" પ્રણાલીમાં (6.17)-(6.18), શિકારીઓ દ્વારા તેમના ખાવાથી થતી શિકાર માછલીની સંખ્યામાં વૃદ્ધિ દરમાં ઘટાડો બરાબર છે. mN x N 2,એટલે કે, શિકારી સાથેની તેમની બેઠકોની સંખ્યાના પ્રમાણમાં. શિકારની હાજરીને કારણે શિકારી માછલીઓની સંખ્યામાં વૃદ્ધિ દરમાં વધારો બરાબર છે nN x N 2,એટલે કે, શિકાર અને શિકારી વચ્ચેની બેઠકોની સંખ્યાના પ્રમાણમાં પણ.
ચાલો પરિમાણહીન ચલોનો પરિચય કરીએ U = mN 2 /aઅને V = nN x /b.ચલની ગતિશીલતા યુશિકારીની ગતિશીલતા અને ચલની ગતિશીલતાને અનુરૂપ છે વી-પીડિત ગતિશીલતા. સમીકરણો (6.17) અને (6.18) ના આધારે, નવા ચલોમાં ફેરફાર સમીકરણોની સિસ્ટમ દ્વારા નક્કી કરવામાં આવે છે:
ચાલો માની લઈએ કે જ્યારે t= 0 બંને જાતિના વ્યક્તિઓની સંખ્યા જાણીતી છે, તેથી, નવા ચલોના પ્રારંભિક મૂલ્યો જાણીતા છે?/(0) = U0, K(0) = K0. સમીકરણોની સિસ્ટમ (6.19) પરથી તેના તબક્કાના માર્ગ માટે વિભેદક સમીકરણ શોધી શકાય છે:

આ સમીકરણના ચલોને વિભાજીત કરીને, આપણને મળે છે: 

ચોખા. 6.10.તબક્કાના માર્ગનું બાંધકામ ADCBAવિભેદક સમીકરણોની સિસ્ટમો (6.19)
અહીંથી, પ્રારંભિક ડેટાને ધ્યાનમાં લેતા, તે નીચે મુજબ છે:
જ્યાં એકીકરણ સ્થિર છે સાથે = b(V Q -માં V 0)/a - lnU 0 + U 0 .
ફિગ માં. આકૃતિ 6.10 બતાવે છે કે C ના આપેલ મૂલ્ય માટે રેખા (6.20) કેવી રીતે બાંધવામાં આવે છે. આ કરવા માટે, અનુક્રમે પ્રથમ, બીજા અને ત્રીજા ક્વાર્ટરમાં, અમે ફંક્શનના ગ્રાફ બનાવીએ છીએ. x = V -માં V, y = (b/a)x, ખાતે==માં U-U+C.
સમાનતાના આધારે dx/dV = (V- 1)/યુ ફંક્શન એક્સ = વી- K માં, પર નિર્ધારિત V> 0, વધે છે જો V> 1, અને ઘટે છે જો V 1. એ હકીકતને કારણે કે cPx/dV 1= 1/F 2 > 0, ફંક્શનનો ગ્રાફ l: = x(V)બહિર્મુખ રીતે નીચે તરફ નિર્દેશિત. સમીકરણ V= 0 વર્ટિકલ એસિમ્પ્ટોટનો ઉલ્લેખ કરે છે. આ ફંક્શનમાં કોઈ ત્રાંસી એસિમ્પ્ટોટ્સ નથી. તેથી, કાર્યનો ગ્રાફ એક્સ = x(Y)ફિગના પ્રથમ ક્વાર્ટરમાં બતાવેલ વળાંક જેવો દેખાય છે. 6.10.
કાર્યનો અભ્યાસ સમાન રીતે કરવામાં આવે છે y =માં U - U+ C,જેનો ગ્રાફ ફિગમાં છે. ત્રીજા ક્વાર્ટરમાં 6.10 દર્શાવવામાં આવ્યું છે.
જો આપણે હવે ફિગમાં મુકીએ. 6.10 બીજા ક્વાર્ટરમાં કાર્યનો ગ્રાફ y = (b/a)x, પછી ચોથા ક્વાર્ટરમાં આપણને એક રેખા મળે છે જે ચલોને જોડે છે યુ અને વી.ખરેખર, મુદ્દાને લઈને વી.ટીધરી પર ઓ.વી.ફંક્શનનો ઉપયોગ કરીને ગણતરી કરો એક્સ= વી - વીસંબંધિત જ્ઞાન x x.તે પછી, ફંક્શનનો ઉપયોગ કરીને ખાતે = (b/a)x, પ્રાપ્ત મૂલ્ય અનુસાર X (અમે શોધીએ છીએ y x(ફિગ. 6.10 માં બીજા ક્વાર્ટર). આગળ, ફંક્શનના ગ્રાફનો ઉપયોગ કરીને ખાતે= માં U - U + Cવ્યાખ્યાયિત કરો અનુરૂપ મૂલ્યોચલ યુ(ફિગ. 6.10 માં આવા બે મૂલ્યો છે - બિંદુઓના કોઓર્ડિનેટ્સ એમઅને એન).આવા તમામ બિંદુઓનો સમૂહ (વી; યુ)ઇચ્છિત વળાંક બનાવે છે. બાંધકામ પરથી તે અનુસરે છે કે અવલંબનનો ગ્રાફ (6.19) એ બિંદુની અંદરની બંધ રેખા છે. ઇ( 1, 1).
ચાલો યાદ કરીએ કે આપણે આ વળાંક કેટલાક પ્રારંભિક મૂલ્યો સેટ કરીને મેળવ્યા છે U 0અને વી 0અને તેમાંથી સતત C ની ગણતરી કરીને અન્ય પ્રારંભિક મૂલ્યો લેવાથી, આપણને બીજી બંધ રેખા મળે છે જે પ્રથમને છેદતી નથી અને તેની અંદર એક બિંદુ પણ છે. ઇ(અગિયાર). આનો અર્થ એ છે કે ફેઝ પ્લેન પર સિસ્ટમ (6.19) ના ટ્રેજેક્ટરીઝનો પરિવાર ( V, U)એક બિંદુની આસપાસ કેન્દ્રિત બંધ વિસંયોજક રેખાઓનો સમૂહ છે ઇ( 1, 1), અને મૂળ મોડેલના ઉકેલો યુ = SCH)અને વી = V(t) સમયાંતરે કાર્યો છે. આ કિસ્સામાં, કાર્યની મહત્તમ યુ = U(t) મહત્તમ કાર્ય સુધી પહોંચતું નથી V = V(t) અને ઊલટું, એટલે કે, તેમના સંતુલન ઉકેલોની આસપાસ વસ્તીની સંખ્યામાં વધઘટ વિવિધ તબક્કાઓમાં થાય છે.
ફિગ માં. આકૃતિ 6.11 તબક્કાના પ્લેન પર વિભેદક સમીકરણો (6.19) ની સિસ્ટમના ચાર માર્ગો બતાવે છે OUV,પ્રારંભિક પરિસ્થિતિઓમાં અલગ. માર્ગોમાંથી એક સંતુલન છે - આ બિંદુ છે ઇ( 1, 1), જે ઉકેલને અનુરૂપ છે U(t) = 1, V(t)= 1. પોઈન્ટ (યુ(ટી),V(t)) અન્ય ત્રણ તબક્કાના માર્ગો પર, જેમ જેમ સમય વધે છે, તેઓ ઘડિયાળની દિશામાં ફેરવાય છે.
બે વસ્તીની સંખ્યામાં ફેરફારોની પદ્ધતિ સમજાવવા માટે, માર્ગને ધ્યાનમાં લો ABCDAફિગ માં. 6.11. જેમ આપણે જોઈ શકીએ છીએ, સાઇટ પર એબીશિકારી અને શિકાર બંને ઓછા છે. તેથી, અહીં ખોરાકના અભાવે શિકારીની વસ્તી ઘટી રહી છે, અને શિકારની વસ્તી વધી રહી છે. સ્થાન ચાલુ સૂર્યશિકારની સંખ્યા ઉચ્ચ મૂલ્યો સુધી પહોંચે છે, જે શિકારીની સંખ્યામાં વધારો તરફ દોરી જાય છે. સ્થાન ચાલુ એસ.એ ત્યાં ઘણા શિકારી છે, અને આ શિકારની સંખ્યામાં ઘટાડો તરફ દોરી જાય છે. તદુપરાંત, બિંદુ પસાર કર્યા પછી ડીપીડિતોની સંખ્યા એટલી ઘટે છે કે વસ્તીનું કદ ઘટવા માંડે છે. ચક્ર પૂર્ણ થયું.
શિકારી-શિકાર મોડેલ માળખાકીય રીતે અસ્થિર મોડેલનું ઉદાહરણ છે. અહીં, સમીકરણોમાંથી એકની જમણી બાજુમાં નાનો ફેરફાર તેના તબક્કાના પોટ્રેટમાં મૂળભૂત ફેરફાર તરફ દોરી શકે છે.

ચોખા. 6.11.

ચોખા. 6.12.
ખરેખર, જો આપણે શિકાર ગતિશીલતાના સમીકરણમાં આંતરવિશિષ્ટ સ્પર્ધાને ધ્યાનમાં લઈએ, તો આપણે વિભેદક સમીકરણોની સિસ્ટમ મેળવીએ છીએ:
અહીં ખાતે t = 0 શિકારની વસ્તી તાર્કિક કાયદા અનુસાર વિકસે છે.
મુ ટી એફ 0 સિસ્ટમના બિન-શૂન્ય સંતુલન ઉકેલ (6.21) કેટલાક માટે હકારાત્મક મૂલ્યોઇન્ટ્રાસ્પેસિફિક સ્પર્ધાનું પરિમાણ અનેએક સ્થિર ફોકસ છે, અને સંતુલન બિંદુ (ફિગ. 6.12) ની આજુબાજુ અનુરૂપ ગતિ “પવન” છે. જો h = 0, પછી આ કિસ્સામાં એકવચન બિંદુ ઇ(સિસ્ટમ (6.19) નું 1, 1) કેન્દ્ર છે, અને માર્ગો બંધ રેખાઓ છે (ફિગ. 6.11 જુઓ).
ટિપ્પણી.સામાન્ય રીતે, "શિકારી-શિકાર" મોડેલને મોડેલ (6.19) તરીકે સમજવામાં આવે છે, જેના તબક્કાના માર્ગો બંધ છે. જો કે, મોડેલ (6.21) એ "શિકારી-શિકાર" મોડેલ પણ છે, કારણ કે તે શિકારી અને શિકારના પરસ્પર પ્રભાવનું વર્ણન કરે છે.
ચક્રીય રીતે બદલાતી પ્રક્રિયાઓના અભ્યાસ માટે અર્થશાસ્ત્રમાં શિકારી-શિકાર મોડલની પ્રથમ એપ્લિકેશનમાંની એક ગુડવિન મેક્રોઇકોનોમિક મોડલ છે, જે રોજગારના સ્તરો અને દરોના પરસ્પર પ્રભાવનું વિશ્લેષણ કરવા માટે સતત અભિગમનો ઉપયોગ કરે છે. વેતન.
V.-B ના કામમાં. ઝાંગ ગુડવિન મોડેલના સંસ્કરણની રૂપરેખા આપે છે જેમાં શ્રમ ઉત્પાદકતા અને શ્રમ પુરવઠો સતત વૃદ્ધિ દરે વધે છે અને ભંડોળનો નિવૃત્તિ દર શૂન્ય છે. આ મોડેલ ઔપચારિક રીતે શિકારી-શિકાર મોડેલના સમીકરણો તરફ દોરી જાય છે.
નીચે અમે બિન-શૂન્ય ફંડ નિવૃત્તિ દરના કિસ્સામાં આ મોડેલમાં ફેરફારને ધ્યાનમાં લઈએ છીએ.
મોડેલ નીચેના સંકેતોનો ઉપયોગ કરે છે: L-કામદારોની સંખ્યા; w-કામદારો માટે સરેરાશ વેતન દર; પ્રતિ -નિશ્ચિત ઉત્પાદન અસ્કયામતો (મૂડી); વાય- રાષ્ટ્રીય આવક; / - રોકાણો; સી - વપરાશ; p એ ભંડોળનો નિવૃત્તિ દર છે; એન- મજૂર બજારમાં મજૂર પુરવઠો; ટી = Y/K- મૂડી ઉત્પાદકતા; એ = Y/L-શ્રમ ઉત્પાદકતા; ખાતે = L/N-રોજગાર દર; એક્સ = C/Y-રાષ્ટ્રીય આવકમાં વપરાશ દર; પ્રતિ -રોકાણના આધારે મૂડીમાં વધારો.
ચાલો ગુડવિન મોડેલના સમીકરણો લખીએ:

જ્યાં a 0, b, g, p, N 0, g- હકારાત્મક સંખ્યાઓ (પરિમાણો).
સમીકરણો (6.22) - (6.24) નીચેનાને વ્યક્ત કરો. સમીકરણ (6.22) એ ફંડ ડાયનેમિક્સ માટેનું સામાન્ય સમીકરણ છે. સમીકરણ (6.23) વેતન દરમાં વધારો દર્શાવે છે ઉચ્ચ સ્તરરોજગાર (મજૂર પુરવઠો ઓછો હોય તો વેતન દર વધે છે) અને જ્યારે બેરોજગારી વધારે હોય ત્યારે વેતન દરમાં ઘટાડો.
આમ, સમીકરણ (6.23) ફિલિપ્સના કાયદાને રેખીય સ્વરૂપમાં વ્યક્ત કરે છે. સમીકરણો (6.24) એટલે શ્રમ ઉત્પાદકતા અને શ્રમ પુરવઠામાં ઘાતાંકીય વૃદ્ધિ. ચાલો એ પણ માની લઈએ કે C = wL,એટલે કે, તમામ વેતન વપરાશ પર ખર્ચવામાં આવે છે. હવે તમે સમાનતાને ધ્યાનમાં રાખીને મોડેલ સમીકરણોને બદલી શકો છો:

ચાલો સમીકરણોને બદલીએ (6.22)-(6.27). અમારી પાસે:  જ્યાં
જ્યાં
જ્યાં ![]()
તેથી, ગુડવિન મોડેલમાં ચલોની ગતિશીલતા વિભેદક સમીકરણોની સિસ્ટમ દ્વારા વર્ણવવામાં આવે છે:

જે ઔપચારિક રીતે શાસ્ત્રીય "શિકારી-શિકાર" મોડેલના સમીકરણો સાથે એકરુપ છે. આનો અર્થ એ છે કે ગુડવિન મોડેલમાં તબક્કાના ચલોના ઓસિલેશન પણ થાય છે. ઓસીલેટરી ડાયનેમિક્સનું મિકેનિઝમ નીચે મુજબ છે: ઓછા વેતન પર ડબલ્યુવપરાશ ઓછો છે, રોકાણ વધારે છે અને આનાથી ઉત્પાદન અને રોજગારમાં વધારો થાય છે uવ્યસ્ત ખાતેસરેરાશ વેતનમાં વધારાનું કારણ બને છે, જે વપરાશમાં વધારો અને રોકાણમાં ઘટાડો, ઉત્પાદનમાં ઘટાડો અને રોજગારમાં ઘટાડો તરફ દોરી જાય છે. u
નીચે, ધ્યાનમાં લેવાયેલા મોડેલના રોજગારના સ્તર પર વ્યાજ દરની અવલંબન વિશેની પૂર્વધારણાનો ઉપયોગ સિંગલ-પ્રોડક્ટ ફર્મની ગતિશીલતાને મોડેલ કરવા માટે થાય છે. તે તારણ આપે છે કે આ કિસ્સામાં, કેટલીક વધારાની ધારણાઓ સાથે, પેઢીના મોડેલમાં ઉપર ચર્ચા કરેલ "શિકારી-શિકાર" મોડેલની ચક્રીય મિલકત છે.
- જુઓ: Volterra V. Decree, op.; રિઝનીએન્કો જી. યુ., રૂબિન એ.બી. હુકમનામું. op
- જુઓ: ઝાંગ વી.-બી. સિનર્જેટિક અર્થતંત્ર. એમ., 2000.
- જુઓ: પુ ટી. બિનરેખીય આર્થિક ગતિશીલતા. ઇઝેવસ્ક, 2000; તિખોનોવ એ.એન. મેથેમેટિકલ મોડેલ // મેથેમેટિકલ જ્ઞાનકોશ. ટી. 3. એમ., 1982. એસ. 574, 575.
કોલમોગોરોવનું મોડેલ એક નોંધપાત્ર ધારણા બનાવે છે: કારણ કે એવું માનવામાં આવે છે કે આનો અર્થ એ છે કે શિકારની વસ્તીમાં એવી પદ્ધતિઓ છે જે શિકારીની ગેરહાજરીમાં પણ તેમની સંખ્યાને નિયંત્રિત કરે છે.
કમનસીબે, મોડેલની આવી રચના એ પ્રશ્નનો જવાબ આપવાની મંજૂરી આપતું નથી કે જેની આસપાસ હમણાં હમણાંત્યાં ઘણી ચર્ચા છે, જેનો આપણે પ્રકરણની શરૂઆતમાં પહેલેથી જ ઉલ્લેખ કર્યો છે: શિકારીઓની વસ્તી શિકારની વસ્તી પર કેવી રીતે નિયમનકારી પ્રભાવ લાવી શકે છે જેથી સમગ્ર સિસ્ટમ ટકાઉ હોય? તેથી, અમે મોડલ (2.1) પર પાછા આવીશું, જેમાં સ્વ-નિયમન પદ્ધતિઓ (ઉદાહરણ તરીકે, ઇન્ટ્રાસ્પેસિફિક સ્પર્ધા દ્વારા નિયમન) શિકારની વસ્તીમાં (તેમજ શિકારીની વસ્તીમાં) ગેરહાજર છે; તેથી, સમુદાયમાં સમાવિષ્ટ પ્રજાતિઓની સંખ્યાને નિયંત્રિત કરવા માટેની એકમાત્ર પદ્ધતિ એ શિકારી અને શિકાર વચ્ચેનો ટ્રોફિક સંબંધ છે.
અહીં (તેથી, અગાઉના મોડેલથી વિપરીત, સ્વાભાવિક રીતે, ઉકેલો (2.1) ચોક્કસ પ્રકારના ટ્રોફિક કાર્ય પર આધાર રાખે છે જે બદલામાં, શિકારની પ્રકૃતિ, એટલે કે, શિકારીની ટ્રોફિક વ્યૂહરચના અને રક્ષણાત્મક વ્યૂહરચના દ્વારા નક્કી કરવામાં આવે છે. શિકાર.
સિસ્ટમ (2.1) માં એક બિન-તુચ્છ સ્થિર બિંદુ છે, જેનાં કોઓર્ડિનેટ્સ સમીકરણો પરથી નક્કી કરવામાં આવે છે
![]()
કુદરતી મર્યાદા હેઠળ.
બીજું છે સ્થિર બિંદુ(0, 0), તુચ્છ સમતુલાને અનુરૂપ. તે બતાવવાનું સરળ છે કે આ બિંદુ એક કાઠી છે, અને વિભાજન એ સંકલન અક્ષો છે.
બિંદુ માટે લાક્ષણિક સમીકરણ ફોર્મ ધરાવે છે
![]()
દેખીતી રીતે, ક્લાસિકલ વોલ્ટેરા મોડેલ માટે.
તેથી, f નું મૂલ્ય વોલ્ટેરા મોડેલમાંથી વિચારણા હેઠળના મોડેલના વિચલનના માપ તરીકે ગણી શકાય.
![]()
સ્થિર બિંદુ એ ફોકસ છે, અને સિસ્ટમમાં ઓસિલેશન દેખાય છે; જ્યારે વિપરીત અસમાનતા સંતુષ્ટ થાય છે, ત્યાં એક નોડ હોય છે, અને સિસ્ટમમાં કોઈ ઓસિલેશન નથી. આ સંતુલન સ્થિતિની સ્થિરતા સ્થિતિ દ્વારા નક્કી કરવામાં આવે છે
એટલે કે, તે શિકારીના ટ્રોફિક કાર્યના પ્રકાર પર નોંધપાત્ર રીતે આધાર રાખે છે.
સ્થિતિ (5.5) નું અર્થઘટન નીચે મુજબ કરી શકાય છે: શિકારી-શિકાર પ્રણાલીના બિન-તુચ્છ સંતુલનની સ્થિરતા માટે (અને આ રીતે આ સિસ્ટમના અસ્તિત્વ માટે), તે પૂરતું છે કે આ રાજ્યની આસપાસના વિસ્તારમાં શિકારનો સાપેક્ષ પ્રમાણમાં વપરાશ થાય છે. શિકારી દ્વારા શિકારની સંખ્યામાં વધારો થાય છે. ખરેખર, શિકારી દ્વારા વપરાશમાં લેવાયેલા શિકારનું પ્રમાણ (તેમની કુલ સંખ્યામાંથી) એક વિભેદક કાર્ય દ્વારા વર્ણવવામાં આવે છે, જે સ્થિતિ (પોઝિટિવ ડેરિવેટિવ) વધારવી તે આના જેવી લાગે છે.
![]()
બિંદુ પર લેવામાં આવેલી છેલ્લી સ્થિતિ એ સંતુલનની સ્થિરતા માટે શરત (5.5) કરતાં વધુ કંઈ નથી. સાતત્ય સાથે, તે બિંદુના ચોક્કસ પડોશમાં પણ પરિપૂર્ણ થવું જોઈએ આમ, જો આ પડોશમાં પીડિતોની સંખ્યા છે
ચાલો હવે ટ્રોફિક ફંક્શન V પાસે ફિગમાં બતાવેલ ફોર્મ છે. 11, a (અપૃષ્ઠવંશી પ્રાણીઓની લાક્ષણિકતા). તે બતાવી શકાય છે કે તમામ મર્યાદિત મૂલ્યો માટે (કારણ કે તે બહિર્મુખ ઉપરની તરફ છે)
એટલે કે, પીડિતોની સ્થિર સંખ્યાના કોઈપણ મૂલ્ય માટે, અસમાનતા (5.5) સંતુષ્ટ નથી.
આનો અર્થ એ છે કે આ પ્રકારના ટ્રોફિક કાર્ય સાથેની સિસ્ટમમાં કોઈ સ્થિર બિન-તુચ્છ સંતુલન નથી. કેટલાક પરિણામો શક્ય છે: કાં તો શિકાર અને શિકારી બંનેની સંખ્યા અનિશ્ચિત સમય માટે વધે છે, અથવા (જ્યારે માર્ગ સંકલન અક્ષોમાંથી એકની નજીકથી પસાર થાય છે) અવ્યવસ્થિત કારણોસર, શિકારની સંખ્યા અથવા શિકારીની સંખ્યા શૂન્યની બરાબર થઈ જશે. જો શિકાર મૃત્યુ પામે છે, તો થોડા સમય પછી શિકારી પણ મરી જશે, પરંતુ જો શિકારી પ્રથમ મૃત્યુ પામે છે, તો પછી શિકારની સંખ્યા ઝડપથી વધવા માંડશે. ત્રીજો વિકલ્પ - સ્થિર મર્યાદા ચક્રનો ઉદભવ - અશક્ય છે, જે સરળતાથી સાબિત થાય છે.
હકીકતમાં, અભિવ્યક્તિ

સકારાત્મક ચતુર્થાંશમાં હંમેશા હકારાત્મક હોય છે, સિવાય કે તેનું સ્વરૂપ ફિગમાં બતાવેલ હોય. 11, એ. પછી, ડ્યુલેક માપદંડ મુજબ, આ પ્રદેશમાં કોઈ બંધ માર્ગો નથી અને સ્થિર મર્યાદા ચક્ર અસ્તિત્વમાં નથી.
તેથી, અમે નિષ્કર્ષ પર આવી શકીએ છીએ: જો ટ્રોફિક કાર્ય ફિગમાં બતાવેલ સ્વરૂપ ધરાવે છે. 11, અને પછી શિકારી એક નિયમનકાર હોઈ શકતો નથી જે શિકારની વસ્તીની સ્થિરતા અને ત્યાંથી સમગ્ર સિસ્ટમની સ્થિરતાને સુનિશ્ચિત કરે છે. સિસ્ટમ માત્ર ત્યારે જ સ્થિર થઈ શકે છે જો શિકારની વસ્તીની પોતાની આંતરિક નિયમનકારી પદ્ધતિઓ હોય, ઉદાહરણ તરીકે, આંતરવિશિષ્ટ સ્પર્ધા અથવા એપિઝ્યુટિક્સ. આ નિયમન વિકલ્પની ચર્ચા પહેલાથી જ §§ 3, 4 માં કરવામાં આવી છે.
અગાઉ નોંધ્યું હતું કે આ પ્રકારનું ટ્રોફિક કાર્ય જંતુ શિકારીઓની લાક્ષણિકતા છે, જેમના "પીડિતો" પણ સામાન્ય રીતે જંતુઓ હોય છે. બીજી બાજુ, ઘણાની ગતિશીલતાના અવલોકનો કુદરતી સમુદાયો"શિકારી-શિકાર" પ્રકારો, જેમાં જંતુઓની પ્રજાતિઓનો સમાવેશ થાય છે, તે દર્શાવે છે કે તેઓ ખૂબ મોટા કંપનવિસ્તારના અને ખૂબ જ ચોક્કસ પ્રકારના ઓસિલેશન દ્વારા વર્ગીકૃત થયેલ છે.
સામાન્ય રીતે, સંખ્યામાં વધુ કે ઓછા ક્રમશઃ વધારો થયા પછી (જે એકવિધ રીતે અથવા વધતા કંપનવિસ્તાર સાથે ઓસિલેશનના સ્વરૂપમાં થઈ શકે છે), તીવ્ર ઘટાડો થાય છે (ફિગ. 14), અને પછી ચિત્રનું પુનરાવર્તન થાય છે. દેખીતી રીતે, જંતુઓની પ્રજાતિઓની સંખ્યાની ગતિશીલતાની આ પ્રકૃતિ ઓછી અને મધ્યમ સંખ્યામાં આ સિસ્ટમની અસ્થિરતા અને મોટી સંખ્યામાં સંખ્યાના શક્તિશાળી ઇન્ટ્રાપોપ્યુલેશન રેગ્યુલેટરની ક્રિયા દ્વારા સમજાવી શકાય છે.

ચોખા. 14. નીલગિરીના વૃક્ષો પર ખોરાક આપતા ઓસ્ટ્રેલિયન સાયલિડ કાર્ડિયાસ્પિના આલ્બીટેક્ચુરાની વસ્તી ગતિશીલતા. (લેખમાંથી: ક્લાર્ક એલ. આર. ધી પોપ્યુલેશન ડાયનેમિક્સ ઓફ કાર્ડિયાસ્પિના અલ્બીટેક્સ્ટ્યુરા.-ઓસ્ટ્ર. જે. ઝૂલ., 1964, 12, નંબર 3, પૃષ્ઠ 362-380.)
જો "શિકારી-શિકાર" સિસ્ટમમાં પૂરતી સક્ષમ પ્રજાતિઓનો સમાવેશ થાય છે પડકારરૂપ વર્તન(ઉદાહરણ તરીકે, શિકારી શીખવા માટે સક્ષમ છે અથવા પીડિત આશ્રય શોધવા માટે સક્ષમ છે), તો પછી આવી સિસ્ટમમાં સ્થિર બિન-તુચ્છ સંતુલનનું અસ્તિત્વ શક્ય છે. આ નિવેદન તદ્દન સરળ રીતે સાબિત થયું છે.
વાસ્તવમાં, ટ્રોફિક ફંક્શનમાં ફિગમાં બતાવેલ ફોર્મ હોવું જોઈએ. 11, સી. આ ગ્રાફ પરનો બિંદુ એ ટ્રોફિક ફંક્શન ગ્રાફના મૂળમાંથી દોરેલી સીધી રેખાનો સ્પર્શ બિંદુ છે, દેખીતી રીતે, આ બિંદુએ કાર્ય મહત્તમ છે. તે દર્શાવવું પણ સરળ છે કે સ્થિતિ (5.5) બધા માટે સંતુષ્ટ છે. પરિણામે, બિન-તુચ્છ સંતુલન જેમાં પીડિતોની સંખ્યા ઓછી હોય છે તે અસંતુલિત રીતે સ્થિર હશે.
જો કે, આ સમતુલાની સ્થિરતાનો વિસ્તાર કેટલો મોટો છે તે વિશે અમે કંઈ કહી શકતા નથી. ઉદાહરણ તરીકે, જો કોઈ અસ્થિર મર્યાદા ચક્ર હોય, તો આ પ્રદેશ ચક્રની અંદર આવેલો હોવો જોઈએ. અથવા બીજો વિકલ્પ: બિન-તુચ્છ સંતુલન (5.2) અસ્થિર છે, પરંતુ એક સ્થિર મર્યાદા ચક્ર છે; આ કિસ્સામાં આપણે શિકારી-શિકાર પ્રણાલીની સ્થિરતા વિશે પણ વાત કરી શકીએ છીએ. ફિગ જેવા ટ્રોફિક ફંક્શન પસંદ કરતી વખતે અભિવ્યક્તિ (5.7) થી. 11, in can change ચિહ્ન પર બદલાતી વખતે, પછી Dulac માપદંડ અહીં કામ કરતું નથી અને મર્યાદા ચક્રના અસ્તિત્વનો પ્રશ્ન ખુલ્લો રહે છે.

કોમ્પ્યુટર મોડલ "પ્રીડેટર-પીડિત"
કાઝાચકોવ ઇગોર અલેકસેવિચ 1, ગુસેવા એલેના નિકોલેવના 2
1 મેગ્નિટોગોર્સ્ક સ્ટેટ ટેકનિકલ યુનિવર્સિટી નામ આપવામાં આવ્યું છે. જી.આઈ. નોસોવા, ઇન્સ્ટિટ્યૂટ ઑફ કન્સ્ટ્રક્શન, આર્કિટેક્ચર અને આર્ટ, 5મા વર્ષના વિદ્યાર્થી
2 મેગ્નિટોગોર્સ્ક સ્ટેટ ટેકનિકલ યુનિવર્સિટી નામ આપવામાં આવ્યું છે. જી.આઈ. નોસોવ, એનર્જી સંસ્થા અને સ્વચાલિત સિસ્ટમો, શિક્ષણશાસ્ત્રના વિજ્ઞાનના ઉમેદવાર, બિઝનેસ ઇન્ફોર્મેટિક્સ અને ઇન્ફર્મેશન ટેક્નોલોજીના વિભાગના એસોસિયેટ પ્રોફેસર
ટીકા
આ લેખ "શિકારી-શિકાર" કમ્પ્યુટર મોડેલની ઝાંખી માટે સમર્પિત છે. હાથ ધરવામાં આવેલ સંશોધન સૂચવે છે કે પર્યાવરણીય સંશોધનમાં પર્યાવરણીય મોડેલિંગ એક વિશાળ ભૂમિકા ભજવે છે. આ મુદ્દો બહુપક્ષીય છે.
કોમ્પ્યુટર મોડલ "પ્રીડેટર-પીડિત"
કાઝાચકોવ ઇગોર અલેકસેવિચ 1, ગુસેવા એલેના નિકોલેવના 2
1 નોસોવ મેગ્નિટોગોર્સ્ક સ્ટેટ ટેકનિકલ યુનિવર્સિટી, સિવિલ એન્જિનિયરિંગ, આર્કિટેક્ચર અને આર્ટસ ઇન્સ્ટિટ્યૂટ, 5મા કોર્સનો વિદ્યાર્થી
2 નોસોવ મેગ્નિટોગોર્સ્ક સ્ટેટ ટેકનિકલ યુનિવર્સિટી, પાવર એન્જિનિયરિંગ અને ઓટોમેટેડ સિસ્ટમ્સ ઇન્સ્ટિટ્યૂટ, શિક્ષણશાસ્ત્ર વિજ્ઞાનમાં પીએચડી, બિઝનેસ કમ્પ્યુટર સાયન્સ અને ઇન્ફર્મેશન ટેક્નોલોજી વિભાગના એસોસિયેટ પ્રોફેસર
અમૂર્ત
આ લેખ કમ્પ્યુટર મોડેલ "શિકારી-પીડિત" ની ઝાંખી આપે છે. અભ્યાસ સૂચવે છે કે પર્યાવરણીય સિમ્યુલેશન પર્યાવરણના અભ્યાસમાં મોટી ભૂમિકા ભજવે છે. આ સમસ્યા બહુપક્ષીય છે.
ઇકોલોજીકલ મોડેલિંગનો ઉપયોગ આપણા પર્યાવરણનો અભ્યાસ કરવા માટે થાય છે. ન હોય તેવા કિસ્સામાં ગાણિતિક મોડલનો ઉપયોગ થાય છે કુદરતી વાતાવરણઅને ત્યાં કોઈ કુદરતી પદાર્થો નથી, તે અભ્યાસ હેઠળના પદાર્થ પર વિવિધ પરિબળોના પ્રભાવની આગાહી કરવામાં મદદ કરે છે. આ પદ્ધતિ પ્રાપ્ત પરિણામોની ચકાસણી, નિર્માણ અને અર્થઘટનના કાર્યો કરે છે. આવા સ્વરૂપોના આધારે, પર્યાવરણીય મોડેલિંગ આપણી આસપાસના પર્યાવરણમાં થતા ફેરફારોનું મૂલ્યાંકન કરે છે.
હાલમાં, આવા સ્વરૂપોનો ઉપયોગ આપણી આસપાસના પર્યાવરણનો અભ્યાસ કરવા માટે થાય છે, અને જ્યારે તેના કોઈપણ ક્ષેત્રનો અભ્યાસ કરવો જરૂરી હોય ત્યારે, ગાણિતિક મોડેલિંગનો ઉપયોગ કરવામાં આવે છે. આ મોડેલ અભ્યાસના ઑબ્જેક્ટ પર ચોક્કસ પરિબળોના પ્રભાવની આગાહી કરવાનું શક્ય બનાવે છે. એક સમયે, "શિકારી-શિકાર" પ્રકારનો પ્રસ્તાવ આવા વૈજ્ઞાનિકો દ્વારા કરવામાં આવ્યો હતો: ટી. માલ્થસ (માલ્થસ 1798, માલ્થસ 1905), વર્હુલ્સ્ટ (વેરહુલ્સ્ટ 1838), પર્લ (પર્લ 1927, 1930), તેમજ એ. લોટકા ( લોટકા 1925, 1927 ) અને વી. વોલ્ટેરા (વોલ્ટેરા 1926) આ મોડેલો સામયિક ઓસીલેટરી શાસનનું પુનરુત્પાદન કરે છે જે પ્રકૃતિમાં આંતરવિશિષ્ટ ક્રિયાપ્રતિક્રિયાઓના પરિણામે ઉદ્ભવે છે.
સમજશક્તિની મુખ્ય પદ્ધતિઓમાંની એક મોડેલિંગ છે. હકીકત એ છે કે તે માં થતા ફેરફારોની આગાહી કરી શકે છે તે ઉપરાંત પર્યાવરણ, સમસ્યાને ઉકેલવા માટે શ્રેષ્ઠ માર્ગ શોધવામાં પણ મદદ કરે છે. વસ્તીના વિકાસમાં પેટર્ન અને વલણો સ્થાપિત કરવા અને અવલોકનોના સારને પ્રકાશિત કરવામાં મદદ કરવા માટે ઇકોલોજીમાં ગાણિતિક મોડેલોનો લાંબા સમયથી ઉપયોગ કરવામાં આવે છે. લેઆઉટ નમૂના તરીકે સેવા આપી શકે છે વર્તન, પદાર્થ.
ગાણિતિક જીવવિજ્ઞાનમાં ઑબ્જેક્ટ્સને ફરીથી બનાવતી વખતે, આગાહીઓનો ઉપયોગ કરવામાં આવે છે વિવિધ સિસ્ટમો, બાયોસિસ્ટમ્સની વિશેષ વ્યક્તિત્વો માટે પ્રદાન કરવામાં આવે છે: વ્યક્તિની આંતરિક રચના, જીવન સહાયક પરિસ્થિતિઓ, ઇકોલોજીકલ સિસ્ટમ્સની સ્થિરતા, જેના કારણે સિસ્ટમોની મહત્વપૂર્ણ પ્રવૃત્તિ સચવાય છે.
કમ્પ્યુટર મોડેલિંગના આગમનથી સંશોધન ક્ષમતાઓની સીમામાં નોંધપાત્ર વધારો થયો છે. વિશ્લેષણાત્મક અભ્યાસને મંજૂરી આપતા નથી તેવા મુશ્કેલ સ્વરૂપોના બહુપક્ષીય અમલીકરણની શક્યતા ઊભી થઈ છે; નવીનતમ દિશાઓ, અને સિમ્યુલેશન મોડેલિંગ પણ.
ચાલો વિચાર કરીએ કે મોડેલિંગ ઑબ્જેક્ટ શું છે. “ઓબ્જેક્ટ એ બંધ રહેઠાણ છે જ્યાં બે જૈવિક વસ્તી વચ્ચે ક્રિયાપ્રતિક્રિયા થાય છે: શિકારી અને શિકાર. વૃદ્ધિ, લુપ્તતા અને પ્રજનનની પ્રક્રિયા થાય છેસીધા નિવાસસ્થાનની સપાટી પર. શિકાર પર્યાવરણમાં રહેલા સંસાધનો પર ખોરાક લે છે, જ્યારે શિકારી શિકારને ખવડાવે છે. આ કિસ્સામાં, પોષક સંસાધનો કાં તો નવીનીકરણીય અથવા બિન-નવીનીકરણીય હોઈ શકે છે.
1931 માં, વિટો વોલ્ટેરાએ શિકારી-શિકાર સંબંધના નીચેના કાયદાઓ મેળવ્યા.
સામયિક ચક્રનો નિયમ - શિકારી દ્વારા શિકારના વિનાશની પ્રક્રિયા ઘણીવાર બંને જાતિઓની વસ્તીના કદમાં સામયિક વધઘટ તરફ દોરી જાય છે, જે ફક્ત માંસાહારી અને શાકાહારી પ્રાણીઓના વિકાસ દર અને તેમની સંખ્યાના પ્રારંભિક ગુણોત્તર પર આધારિત છે.
સરેરાશ સંરક્ષણનો કાયદો - પ્રારંભિક સ્તરને ધ્યાનમાં લીધા વિના, દરેક જાતિની સરેરાશ વિપુલતા સ્થિર છે, જો કે વસ્તી વધારાના ચોક્કસ દરો, તેમજ શિકારની કાર્યક્ષમતા, સતત હોય.
સરેરાશ મૂલ્યોના ઉલ્લંઘનનો કાયદો - જ્યારે બંને જાતિઓ તેમની સંખ્યાના પ્રમાણમાં ઘટાડવામાં આવે છે, ત્યારે શિકારની સરેરાશ વસ્તીનું કદ વધે છે, અને શિકારીઓની સંખ્યા ઘટે છે.
શિકારી-શિકાર મોડેલ એ શિકારી અને તેના શિકાર વચ્ચેનો એક વિશેષ સંબંધ છે, જેના પરિણામે બંનેને ફાયદો થાય છે. પર્યાવરણીય પરિસ્થિતિઓમાં સૌથી વધુ સ્વસ્થ અને અનુકૂલિત વ્યક્તિઓ ટકી રહે છે, એટલે કે. આ બધું થાય છે આભાર પ્રાકૃતિક પસંદગી. એવા વાતાવરણમાં જ્યાં પ્રજનન માટેની કોઈ તક નથી, શિકારી વહેલા કે પછી શિકારની વસ્તીનો નાશ કરશે, જેના પરિણામે તે પોતે જ લુપ્ત થઈ જશે."
પૃથ્વી પર ઘણા જીવંત જીવો છે જે, અનુકૂળ પરિસ્થિતિઓમાં, તેમના સંબંધીઓની સંખ્યામાં પ્રચંડ પ્રમાણમાં વધારો કરે છે. આ ક્ષમતા કહેવામાં આવે છે: એક પ્રજાતિની જૈવિક સંભવિત, એટલે કે. જાતિઓની સંખ્યામાં વધારો ચોક્કસ સમયગાળોસમય. દરેક પ્રજાતિની પોતાની જૈવિક ક્ષમતા હોય છે, ઉદાહરણ તરીકે મોટી પ્રજાતિઓએક વર્ષમાં સજીવો માત્ર 1.1 ગણો વધી શકે છે, બદલામાં, સજીવો વધુ નાની પ્રજાતિઓ, જેમ કે ક્રસ્ટેસિયન, વગેરે. તેમના દેખાવને 1030 ગણો વધારી શકે છે, પરંતુ બેક્ટેરિયા હજુ પણ છે વધુ. આમાંના કોઈપણ કિસ્સામાં, વસ્તી ઝડપથી વધશે.
સંખ્યાઓમાં ઘાતાંકીય વૃદ્ધિ કહેવાય છે ભૌમિતિક પ્રગતિવસ્તી વધારો. આ ક્ષમતા બેક્ટેરિયા અને યીસ્ટમાં પ્રયોગશાળામાં જોઈ શકાય છે. માં ના પ્રયોગશાળા શરતોઘાતાંકીય વૃદ્ધિ તીડના ઉદાહરણમાં અથવા અન્ય પ્રકારના જંતુઓમાં જોઈ શકાય છે. પ્રજાતિઓની સંખ્યામાં આટલો વધારો તે સ્થળોએ જોઇ શકાય છે જ્યાં તેનો વ્યવહારિક રીતે કોઈ દુશ્મન નથી, અને ત્યાં પૂરતા પ્રમાણમાં ખોરાક છે. છેવટે, જાતિઓમાં વધારો, ટૂંકા ગાળા માટે સંખ્યા વધ્યા પછી, વસ્તી વૃદ્ધિમાં ઘટાડો થવા લાગ્યો.
ચાલો ઉદાહરણ તરીકે લોટકા-વોલ્ટેરા મોડેલનો ઉપયોગ કરીને સસ્તન પ્રાણીઓના પ્રજનનનાં કમ્પ્યુટર મોડેલને ધ્યાનમાં લઈએ. દો ચોક્કસ વિસ્તારમાં, બે પ્રકારના પ્રાણીઓ રહે છે: હરણ અને વરુ. મોડેલમાં વસ્તીના ફેરફારોનું ગાણિતિક મોડલટ્રે-વોલ્ટેરા:
પીડિતોની પ્રારંભિક સંખ્યા xn છે, શિકારીઓની સંખ્યા yn છે.
મોડલ પરિમાણો:
P1 - શિકારી સાથે મળવાની સંભાવના,
P2 - શિકારના ભોગે શિકારીની વૃદ્ધિનો ગુણાંક,
ડી - શિકારી મૃત્યુ દર,
a એ પીડિતોની સંખ્યામાં વધારો થવાનો ગુણાંક છે.
તાલીમ કાર્યમાં, નીચેના મૂલ્યો સેટ કરવામાં આવ્યા હતા: હરણની સંખ્યા 500 હતી, વરુની સંખ્યા 10 હતી, હરણનો વિકાસ દર 0.02 હતો, વરુનો વૃદ્ધિ દર 0.1 હતો, શિકારીને મળવાની સંભાવના હતી. 0.0026, શિકારના ભોગે શિકારીનો વિકાસ દર 0,000056 હતો. ડેટા 203 વર્ષ માટે ગણવામાં આવે છે.
અમે પ્રભાવનું અન્વેષણ કરીએ છીએ બે વસ્તીના વિકાસ માટે પીડિતોમાં વધારાનો ગુણાંક, બાકીના પરિમાણો યથાવત રાખવામાં આવશે.સ્કીમ 1 માં, શિકારની સંખ્યામાં વધારો જોવા મળે છે અને પછી, થોડા વિલંબ સાથે, શિકારીઓમાં વધારો જોવા મળે છે. પછી શિકારીઓ પીડિતોને પછાડે છે, પીડિતોની સંખ્યામાં તીવ્ર ઘટાડો થાય છે અને, તેને અનુસરીને, શિકારીઓની સંખ્યા ઘટે છે (ફિગ. 1).

આકૃતિ 1. પીડિતોમાં નીચા જન્મ દર સાથે વસ્તીનું કદ
ચાલો પીડિતનો જન્મદર a=0.06 વધારીને મોડેલમાં થયેલા ફેરફારનું વિશ્લેષણ કરીએ. ડાયાગ્રામ 2 માં આપણે એક ચક્રીય ઓસીલેટરી પ્રક્રિયા જોઈએ છીએ જે સમય જતાં બંને વસ્તીની સંખ્યામાં વધારો તરફ દોરી જાય છે (ફિગ. 2).

આકૃતિ 2. પીડિતોના સરેરાશ જન્મ દર પર વસ્તીનું કદ
ચાલો વિચાર કરીએ કે પીડિતના જન્મ દર a=1.13ના ઊંચા મૂલ્ય સાથે વસ્તીની ગતિશીલતા કેવી રીતે બદલાશે. ફિગ માં. 3 બંને વસ્તીની સંખ્યામાં તીવ્ર વધારો થયો છે, ત્યારબાદ શિકાર અને શિકારી બંને લુપ્ત થયા છે. આ એ હકીકતને કારણે થાય છે કે શિકારની વસ્તી એટલી હદે વધી ગઈ છે કે સંસાધનો સમાપ્ત થવા લાગ્યા છે, પરિણામે શિકાર લુપ્ત થઈ ગયો છે. શિકારીઓની લુપ્તતા એ હકીકતને કારણે થાય છે કે શિકારની સંખ્યામાં ઘટાડો થયો છે અને શિકારીઓ પાસે ટકી રહેવા માટે સંસાધનો સમાપ્ત થઈ ગયા છે.
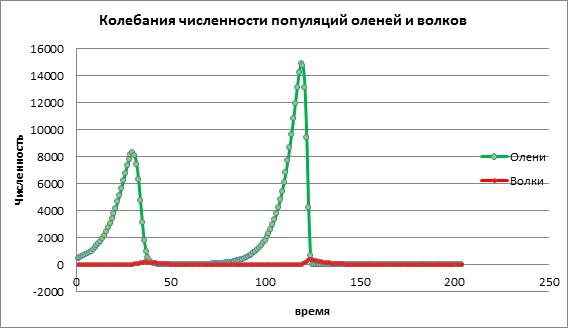
આકૃતિ 3. પીડિતોમાં ઊંચા જન્મ દર સાથે વસ્તીનું કદ
કમ્પ્યુટર પ્રયોગ ડેટાના વિશ્લેષણના આધારે, અમે નિષ્કર્ષ પર આવી શકીએ છીએ કે કમ્પ્યુટર મોડેલિંગ અમને વસ્તીના કદની આગાહી કરવા અને વસ્તી ગતિશીલતા પરના વિવિધ પરિબળોના પ્રભાવનો અભ્યાસ કરવાની મંજૂરી આપે છે. ઉપરોક્ત ઉદાહરણમાં, અમે શિકારી-શિકાર મોડેલની તપાસ કરી, હરણ અને વરુઓની સંખ્યા પર શિકારના જન્મ દરનો પ્રભાવ. શિકારની વસ્તીમાં થોડો વધારો શિકારમાં થોડો વધારો તરફ દોરી જાય છે, જે ચોક્કસ સમયગાળા પછી શિકારીઓ દ્વારા નાશ પામે છે.શિકારની વસ્તીમાં મધ્યમ વધારો બંને વસ્તીના કદમાં વધારો તરફ દોરી જાય છે. ઉચ્ચ લાભશિકારની વસ્તી પહેલા શિકારની વસ્તીમાં ઝડપી વધારો તરફ દોરી જાય છે, આ શિકારીની વૃદ્ધિને અસર કરે છે, પરંતુ પછી ગુણાકાર કરતા શિકારી ઝડપથી હરણની વસ્તીનો નાશ કરે છે. પરિણામે, બંને જાતિઓ લુપ્ત થઈ જાય છે.
PA88 સિસ્ટમ, જે એકસાથે 100 થી વધુ ફાર્માકોલોજિકલ અસરો અને તેના માળખાકીય સૂત્રના આધારે પદાર્થની ક્રિયા કરવાની પદ્ધતિઓની સંભાવનાની આગાહી કરે છે. આયોજન સ્ક્રિનિંગ માટેના આ અભિગમની અસરકારકતા લગભગ 800% છે, અને કમ્પ્યુટરની આગાહીની ચોકસાઈ નિષ્ણાતોની આગાહી કરતા 300% વધારે છે.
તેથી, દવામાં નવું જ્ઞાન અને ઉકેલો મેળવવા માટેનું એક રચનાત્મક સાધન છે ગાણિતિક મોડેલિંગની પદ્ધતિ. દવાના ગણિતીકરણની પ્રક્રિયા એ વૈજ્ઞાનિક જ્ઞાનના આંતરપ્રવેશનું વારંવાર અભિવ્યક્તિ છે, જે સારવાર અને નિવારક કાર્યની કાર્યક્ષમતામાં વધારો કરે છે.
4. ગાણિતિક મોડલ "શિકારી-શિકાર"
જીવવિજ્ઞાનમાં પ્રથમ વખત, ઇટાલિયન ગણિતશાસ્ત્રી વી. વોલ્ટેરા અને તેમના સાથીદારો દ્વારા વિરોધી પ્રાણી પ્રજાતિઓની સંખ્યામાં સામયિક ફેરફારોનું ગાણિતિક મોડેલ પ્રસ્તાવિત કરવામાં આવ્યું હતું. વોલ્ટેરા દ્વારા પ્રસ્તાવિત મોડલ એ. લોટ્કા દ્વારા 1924માં "એલિમેન્ટ્સ ઑફ ફિઝિકલ બાયોલોજી" પુસ્તકમાં દર્શાવેલ વિચારનો વિકાસ હતો. તેથી, આ શાસ્ત્રીય ગાણિતિક મોડેલ "લોટ્ટકી-વોલ્ટેરા" મોડેલ તરીકે ઓળખાય છે.
જો કે પ્રકૃતિમાં વિરોધી પ્રજાતિઓના સંબંધો મોડેલ કરતાં વધુ જટિલ હોય છે, તેમ છતાં તેઓ ગાણિતિક મોડેલિંગના મૂળભૂત વિચારોનો અભ્યાસ કરવા માટે એક સારું શિક્ષણ મોડેલ છે.
તેથી, સમસ્યા: કેટલાક પર્યાવરણીય રીતે બંધ વિસ્તારમાં પ્રાણીઓની બે પ્રજાતિઓ રહે છે (ઉદાહરણ તરીકે, લિંક્સ અને સસલા). હરેસ (શિકાર) છોડના ખોરાકને ખવડાવે છે, જે હંમેશા પૂરતી માત્રામાં ઉપલબ્ધ હોય છે (આ મોડેલ છોડના ખોરાકના મર્યાદિત સંસાધનોને ધ્યાનમાં લેતું નથી). લિંક્સ (શિકારી) ફક્ત સસલું ખાઈ શકે છે. આવી ઇકોલોજીકલ સિસ્ટમમાં સમય જતાં શિકાર અને શિકારીઓની સંખ્યા કેવી રીતે બદલાશે તે નિર્ધારિત કરવું જરૂરી છે. જો શિકારની વસ્તી વધે છે, તો શિકારી અને શિકાર વચ્ચેના મુકાબલોની સંભાવના વધે છે, અને તે મુજબ, ચોક્કસ સમય વિલંબ પછી, શિકારીની વસ્તી વધે છે. આ એકદમ સરળ મોડેલ શિકારી અને પ્રકૃતિમાં શિકારની વાસ્તવિક વસ્તી વચ્ચેની ક્રિયાપ્રતિક્રિયાનું પર્યાપ્ત રીતે વર્ણન કરે છે.
હવે ચાલો શરુ કરીએવિભેદક સમીકરણો દોરવા. વિશે
ચાલો શિકારની સંખ્યા N દ્વારા દર્શાવીએ, અને M દ્વારા શિકારીની સંખ્યા. N અને M સંખ્યાઓ સમય t ના કાર્યો છે. અમારા મોડેલમાં અમે નીચેના પરિબળોને ધ્યાનમાં લઈએ છીએ:
એ) પીડિતોનું કુદરતી પ્રજનન; b) પીડિતોનું કુદરતી મૃત્યુ;
c) શિકારીઓ દ્વારા પીડિતોને ખાઈને તેમનો વિનાશ; ડી) શિકારીઓની કુદરતી લુપ્તતા;
e) ખોરાકની હાજરીમાં પ્રજનનને કારણે શિકારીની સંખ્યામાં વધારો.
કારણ કે આપણે ગાણિતિક મોડેલ વિશે વાત કરી રહ્યા છીએ, કાર્ય એ સમીકરણો મેળવવાનું છે જેમાં તમામ હેતુવાળા પરિબળો શામેલ હશે અને તે ગતિશીલતાનું વર્ણન કરશે, એટલે કે, સમય જતાં શિકારીઓ અને શિકારની સંખ્યામાં ફેરફાર.
અમુક સમય માટે શિકાર અને શિકારીની સંખ્યામાં ∆N અને ∆M દ્વારા ફેરફાર થવા દો. પીડિતોની સંખ્યામાં ફેરફાર ∆N સમય જતાં ∆t નક્કી કરવામાં આવે છે, સૌ પ્રથમ, કુદરતી પ્રજનન (જે પીડિતોની ઉપલબ્ધ સંખ્યાના પ્રમાણસર છે) ના પરિણામે વધારા દ્વારા.
જ્યાં B એ પીડિતોના કુદરતી લુપ્ત થવાના દરને દર્શાવતો પ્રમાણસરતા ગુણાંક છે.
શિકારીઓ દ્વારા તેમના વપરાશને કારણે શિકારની સંખ્યામાં ઘટાડો થવાનું વર્ણન કરતા સમીકરણની વ્યુત્પત્તિ એ વિચાર પર આધારિત છે કે તેઓ જેટલી વાર સામનો કરે છે, તેટલી ઝડપથી શિકારની સંખ્યામાં ઘટાડો થાય છે. તે પણ સ્પષ્ટ છે કે શિકારી અને શિકાર વચ્ચેના મુકાબલોની આવર્તન પીડિતોની સંખ્યા અને શિકારીઓની સંખ્યા બંનેના પ્રમાણસર છે.
સમીકરણ (4) ની ડાબી અને જમણી બાજુઓને ∆t વડે વિભાજીત કરીને અને ∆t→0 પરની મર્યાદામાં પસાર થવાથી, અમે પ્રથમ-ક્રમનું વિભેદક સમીકરણ મેળવીએ છીએ:
આ સમીકરણને ઉકેલવા માટે, તમારે જાણવાની જરૂર છે કે શિકારીઓ (M) ની સંખ્યા સમય સાથે કેવી રીતે બદલાય છે. શિકારીની સંખ્યામાં ફેરફાર (∆M) પૂરતા ખોરાકની હાજરીમાં કુદરતી પ્રજનન (M 1 = Q∙N∙M∙∆t) અને શિકારીઓના કુદરતી લુપ્ત થવાને કારણે થયેલા ઘટાડા દ્વારા નક્કી કરવામાં આવે છે. M 2 = - P∙M∙∆ t):
M = Q∙N∙M∙∆t - P∙M∙∆t |
સમીકરણ (6) થી આપણે વિભેદક સમીકરણ મેળવી શકીએ છીએ:
વિભેદક સમીકરણો (5) અને (7) ગાણિતિક "શિકારી-શિકાર" મોડેલનું પ્રતિનિધિત્વ કરે છે. ગુણાંકના મૂલ્યો નક્કી કરવા માટે તે પૂરતું છે

ents A, B, C, Q, P અને એક ગાણિતિક મોડેલનો ઉપયોગ સમસ્યાને ઉકેલવા માટે કરી શકાય છે.
ગાણિતિક મોડલ તપાસી અને સમાયોજિત કરો. આ પ્રયોગશાળામાં
સૌથી સંપૂર્ણ ગાણિતિક મોડેલ (સમીકરણો 5 અને 7) ની ગણતરી કરવા ઉપરાંત, તે સરળ મુદ્દાઓનો અભ્યાસ કરવાની દરખાસ્ત છે જેમાં કંઈક ધ્યાનમાં લેવામાં આવતું નથી.
ગાણિતિક મોડેલની જટિલતાના પાંચ સ્તરોને ધ્યાનમાં લીધા પછી, તમે મોડેલને તપાસવા અને ગોઠવવાના તબક્કાને "અનુભૂતિ" કરી શકો છો.
1 લી સ્તર - મોડેલમાં, "શિકાર" માટે ફક્ત તેમના કુદરતી પ્રજનનને ધ્યાનમાં લેવામાં આવે છે, ત્યાં કોઈ "શિકારી" નથી;
સ્તર 2 - મોડેલ "શિકાર" ના કુદરતી લુપ્તતાને ધ્યાનમાં લે છે, ત્યાં કોઈ "શિકારી" નથી;
સ્તર 3 - મોડેલ "પીડિતો" ના કુદરતી પ્રજનનને ધ્યાનમાં લે છે
અને લુપ્તતા, કોઈ "શિકારી" નથી;
4થું સ્તર - મોડેલ "પીડિતો" ના કુદરતી પ્રજનનને ધ્યાનમાં લે છે
અને લુપ્તતા, તેમજ "શિકારી" દ્વારા ખાવામાં આવે છે, પરંતુ "શિકારી" ની સંખ્યા યથાવત છે;
સ્તર 5 - મોડેલ ચર્ચા કરેલ તમામ પરિબળોને ધ્યાનમાં લે છે.
તેથી, અમારી પાસે વિભેદક સમીકરણોની નીચેની સિસ્ટમ છે:
જ્યાં M એ "શિકારી" ની સંખ્યા છે; એન - "પીડિતો" ની સંખ્યા;
ટી - વર્તમાન સમય;
A - "પીડિતો" ના પ્રજનનનો દર; સી - શિકારી-શિકાર એન્કાઉન્ટરની આવર્તન; બી - "પીડિતો" ના લુપ્ત થવાનો દર;
પ્ર - "શિકારી" નું પ્રજનન;
પી - "શિકારી" ની લુપ્તતા.
1 લી સ્તર: M = 0, B = 0; 2 જી સ્તર: M = 0, A = 0; 3 જી સ્તર: M = 0; 4 થી સ્તર: Q = 0, P = 0;
સ્તર 5: સમીકરણોની સંપૂર્ણ સિસ્ટમ.
દરેક સ્તરમાં ગુણાંકના મૂલ્યોને બદલીને, આપણને મળે છે વિવિધ ઉકેલો, દાખ્લા તરીકે:
3જી સ્તર માટે ગુણાંક M=0 નું મૂલ્ય, પછી

આપણે જે સમીકરણ મેળવીએ છીએ તેને હલ કરીએ છીએ
તેવી જ રીતે સ્તર 1 અને 2 માટે. 4થા અને 5મા સ્તરની વાત કરીએ તો, અહીં Runge-Kutta પદ્ધતિનો ઉપયોગ કરીને સમીકરણોની સિસ્ટમ ઉકેલવી જરૂરી છે. પરિણામે, અમને ઉકેલ મળે છે ગાણિતિક મોડેલોઆ સ્તરો.
II. પ્રાયોગિક પાઠ દરમિયાન વિદ્યાર્થીઓનું કાર્ય
વ્યાયામ 1 . મૌખિક ભાષણ નિયંત્રણ અને પાઠની સૈદ્ધાંતિક સામગ્રીમાં નિપુણતા માટે કરેક્શન. વર્ગોમાં પ્રવેશ મેળવવો.
કાર્ય 2. પ્રયોગશાળાના કાર્ય હાથ ધરવા, પ્રાપ્ત પરિણામોની ચર્ચા કરવી, નોંધો લખવી.
કાર્ય પૂર્ણ કરી રહ્યા છીએ
1. કોમ્પ્યુટર ડેસ્કટોપ પરથી, ડાબી માઉસ બટન વડે અનુરૂપ શોર્ટકટ પર ડબલ-ક્લિક કરીને "લેબ નંબર 6" પ્રોગ્રામને કૉલ કરો.
2. "PREDATOR" શોર્ટકટ પર ડાબી માઉસ બટન પર બે વાર ક્લિક કરો.
3. "PRED" શોર્ટકટ પસંદ કરો અને ડાબું માઉસ બટન (ડબલ-ક્લિક કરીને) નો ઉપયોગ કરીને પ્રોગ્રામ કૉલને પુનરાવર્તિત કરો.
4. શીર્ષક સ્ક્રીન પછી, "ENTER" દબાવો.
5. મોડેલિંગ સાથે શરૂ થાય છે 1 લી સ્તર.
6. તે વર્ષ દાખલ કરો કે જ્યાંથી મોડેલનું વિશ્લેષણ કરવામાં આવશે: ઉદાહરણ તરીકે, 2000
7. સમય અંતરાલ પસંદ કરો, ઉદાહરણ તરીકે, 40 વર્ષની અંદર, 1 વર્ષ પછી (પછી 4 વર્ષ પછી).
2 જી સ્તર: B = 0.05; N0 = 200;
3 જી સ્તર: A = 0.02; બી = 0.05; એન = 200;
4 થી સ્તર: A = 0.01; બી = 0.002; સી = 0.01; N0 = 200; એમ = 40; 5મું સ્તર: A = 1; બી = 0.5; સી = 0.02; ક્યૂ = 0.002; પી = 0.3; N0 = 200;
9. કાર્ય પર લેખિત અહેવાલ તૈયાર કરો, જેમાં સમીકરણો, આલેખ, મોડેલની લાક્ષણિકતાઓની ગણતરીના પરિણામો, કરેલા કાર્ય પરના તારણો હોવા જોઈએ.
કાર્ય 3. જ્ઞાનના અંતિમ સ્તરનું નિરીક્ષણ કરવું:
a) પૂર્ણ થયેલ કાર્ય માટે મૌખિક અહેવાલ પ્રયોગશાળા કામ; b) પરિસ્થિતિગત સમસ્યાઓનું નિરાકરણ; c) કમ્પ્યુટર પરીક્ષણ.
કાર્ય 4. આગલા પાઠ માટે સોંપણી: પાઠનો વિભાગ અને વિષય, અમૂર્ત અહેવાલો માટે વિષયોનું સંકલન (અહેવાલની લંબાઈ 2-3 પૃષ્ઠો, સમય મર્યાદા 5-7 મિનિટ).
20 ના દાયકામાં પાછા. એ. લોટકા, અને કંઈક અંશે પછીથી, તેમનાથી સ્વતંત્ર રીતે, વી. વોલ્ટેરાએ, ગાણિતિક મોડેલો પ્રસ્તાવિત કર્યા જે શિકારી અને શિકારની વસ્તીમાં સંયુક્ત વધઘટનું વર્ણન કરે છે. ચાલો લોટકા-વોલ્ટેરા મોડેલના સૌથી સરળ સંસ્કરણને ધ્યાનમાં લઈએ. મોડેલ સંખ્યાબંધ ધારણાઓ પર આધારિત છે:
1) શિકારીની ગેરહાજરીમાં શિકારની વસ્તી ઝડપથી વધે છે,
2) શિકારીનું દબાણ આ વૃદ્ધિને અટકાવે છે,
3) શિકારની મૃત્યુદર શિકારી અને શિકાર (અથવા અન્યથા, તેમની વસ્તી ગીચતાના ઉત્પાદનના પ્રમાણસર) વચ્ચેના મુકાબલોની આવર્તન સાથે પ્રમાણસર છે;
4) શિકારીનો જન્મ દર શિકારના વપરાશની તીવ્રતા પર આધાર રાખે છે.
શિકારની વસ્તીના કદમાં ફેરફારનો ત્વરિત દર સમીકરણ દ્વારા વ્યક્ત કરી શકાય છે
dN f /dt = r 1 N f - p 1 N f N x,
જ્યાં આર 1 - શિકારની વસ્તી વૃદ્ધિનો ચોક્કસ ત્વરિત દર, p 1 - શિકારની ઘનતા સાથે શિકારની મૃત્યુદરને સતત જોડતો, a એન અને એન એક્સ - અનુક્રમે શિકાર અને શિકારીની ઘનતા.
આ મોડેલમાં શિકારીની વસ્તીનો ત્વરિત વૃદ્ધિ દર જન્મ દર અને સતત મૃત્યુદર વચ્ચેના તફાવત જેટલો હોવાનું માનવામાં આવે છે:
dN x /dt = p 2 N x N x – d 2 N x,
જ્યાં પૃષ્ઠ 2 - શિકારીની વસ્તીમાં જન્મ દરને શિકારની ઘનતા સાથે સતત સંબંધિત, a d 2 - શિકારીનો ચોક્કસ મૃત્યુ દર.
ઉપરોક્ત સમીકરણો અનુસાર, તેના વધારામાં ક્રિયાપ્રતિક્રિયા કરતી દરેક વસ્તી માત્ર અન્ય વસ્તી દ્વારા મર્યાદિત છે, એટલે કે. પીડિતોની સંખ્યામાં વધારો શિકારીઓના દબાણ દ્વારા મર્યાદિત છે, અને શિકારીઓની સંખ્યામાં વધારો પીડિતોની અપૂરતી સંખ્યા દ્વારા મર્યાદિત છે. વસ્તીની કોઈ સ્વ-મર્યાદા ધારવામાં આવતી નથી. એવું માનવામાં આવે છે, ઉદાહરણ તરીકે, પીડિત માટે હંમેશા પૂરતો ખોરાક હોય છે. એવી પણ અપેક્ષા રાખવામાં આવતી નથી કે શિકારની વસ્તી શિકારીના નિયંત્રણમાંથી છટકી જશે, જો કે હકીકતમાં આવું ઘણી વાર થાય છે.
લોટકા-વોલ્ટેરા મોડેલની તમામ પરંપરાગતતા હોવા છતાં, તે ધ્યાન આપવાનું પાત્ર છે જો માત્ર કારણ કે તે બતાવે છે કે કેવી રીતે બે વસ્તી વચ્ચેની ક્રિયાપ્રતિક્રિયાની આવી આદર્શ પદ્ધતિ તેમની સંખ્યાઓની ખૂબ જટિલ ગતિશીલતાને જન્મ આપી શકે છે. આ સમીકરણોની પ્રણાલીને ઉકેલવાથી આપણે દરેક પ્રજાતિની સતત (સંતુલન) સંખ્યા જાળવવા માટેની શરતો ઘડી શકીએ છીએ. શિકારની વસ્તી સ્થિર રહે છે જો શિકારીની ઘનતા r 1 /p 1 ની બરાબર હોય, અને શિકારીની વસ્તી સ્થિર રહેવા માટે, શિકારની ઘનતા d 2 /p 2 ની બરાબર હોવી જોઈએ. જો આપણે એક્સ-અક્ષ પર પીડિતોની ઘનતાનું કાવતરું કરીએ એન અને , અને ઓર્ડિનેટ સાથે - શિકારીની ઘનતા એન એક્સ, તો પછી શિકારી અને શિકારની સ્થિરતાની સ્થિતિ દર્શાવતી આઇસોકલાઇન્સ એકબીજાને અને સંકલન અક્ષો પર લંબરૂપ બે સીધી રેખાઓ હશે (ફિગ. 6,a). એવું માનવામાં આવે છે કે શિકારની ચોક્કસ (d 2 /p 2 ની બરાબર) ઘનતાની નીચે, શિકારીની ઘનતા હંમેશા ઘટશે, અને તેની ઉપર હંમેશા વધશે. તદનુસાર, શિકારની ઘનતા વધે છે જો શિકારીની ઘનતા r 1/p 1 ની કિંમતની નીચે હોય, અને જો તે આ મૂલ્યથી ઉપર હોય તો તે ઘટે છે. આઇસોક્લાઇન્સનો આંતરછેદ બિંદુ શિકારી અને શિકારની સતત વિપુલતાની સ્થિતિને અનુરૂપ છે, અને આ ગ્રાફના પ્લેન પરના અન્ય બિંદુઓ બંધ માર્ગ સાથે આગળ વધે છે, આમ શિકારી અને શિકારની વિપુલતામાં નિયમિત વધઘટને પ્રતિબિંબિત કરે છે (ફિગ. 6, b).ઓસિલેશનની શ્રેણી શિકારી અને શિકારની ઘનતાના પ્રારંભિક ગુણોત્તર દ્વારા નક્કી કરવામાં આવે છે. તે આઇસોક્લાઇન્સના આંતરછેદ બિંદુની જેટલી નજીક છે, વેક્ટર દ્વારા વર્ણવેલ વર્તુળ જેટલું નાનું છે, અને તે મુજબ, ઓસિલેશનનું કંપનવિસ્તાર નાનું છે.
ચોખા. 6. શિકારી-શિકાર પ્રણાલી માટે લોટકા-વોલ્ટેર મોડેલની ગ્રાફિકલ અભિવ્યક્તિ.
પ્રયોગશાળાના પ્રયોગોમાં શિકારી અને શિકારની વિપુલતામાં વધઘટ મેળવવાનો પ્રથમ પ્રયાસ જી.એફ.નો હતો. ગૌસ. આ પ્રયોગોના પદાર્થો પેરામેશિયમ સિલિએટ હતા (પેરામેશિયમ પુચ્છ) અને શિકારી સિલિએટ ડીડીનિયમ (ડીડીનિયમ નાસુતુમ). પેરામેશિયમ માટેનો ખોરાક એ બેક્ટેરિયાનું સસ્પેન્શન હતું જે માધ્યમમાં નિયમિતપણે ઉમેરવામાં આવતું હતું, અને ડિડિનિયમ માત્ર પેરામેશિયમ પર જ ખવડાવતું હતું. આ સિસ્ટમ અત્યંત અસ્થિર હોવાનું બહાર આવ્યું: શિકારીનું દબાણ, તેની સંખ્યામાં વધારો થતાં, પીડિતોનો સંપૂર્ણ સંહાર થયો, જેના પછી શિકારીની વસ્તી પોતે જ મરી ગઈ. પ્રયોગોને જટિલ બનાવતા, ગૌસે પીડિત માટે આશ્રયની વ્યવસ્થા કરી, સિલિએટ્સ સાથે ટેસ્ટ ટ્યુબમાં થોડું કાચનું ઊન દાખલ કર્યું. પેરામેસિયા કપાસના ઊનના થ્રેડો વચ્ચે મુક્તપણે ફરી શકે છે, પરંતુ ડીડીનિયમ્સ કરી શકતા નથી. પ્રયોગના આ સંસ્કરણમાં, ડીડીનિયમે ટેસ્ટ ટ્યુબના કપાસ-મુક્ત ભાગમાં તરતા તમામ પેરામેસિયા ખાધા અને મૃત્યુ પામ્યા, અને પછી આશ્રયસ્થાનમાં બચી ગયેલા વ્યક્તિઓના પ્રજનનને કારણે પેરામેસિયાની વસ્તી પુનઃસ્થાપિત થઈ. ગૌસે શિકારી અને શિકારની સંખ્યામાં વધઘટની કેટલીક સમાનતા ત્યારે જ હાંસલ કરવામાં સક્ષમ હતી જ્યારે તેણે સમયાંતરે શિકાર અને શિકારી બંનેને સંસ્કૃતિમાં રજૂ કર્યા, આમ સ્થળાંતરનું અનુકરણ કર્યું.
ગૌસેના કામના 40 વર્ષ પછી, એલ. લકીનબિલ દ્વારા તેમના પ્રયોગોનું પુનરાવર્તન કરવામાં આવ્યું, જેમણે શિકાર તરીકે સિલિએટ્સનો ઉપયોગ કર્યો. પેરામેશિયમ ઓરેલિયા, અને તે જ એક શિકારી તરીકે ડીડીનિયમ નાસુતુમ. લકીનબિલ આ વસ્તીની સંખ્યામાં વધઘટના અનેક ચક્રો મેળવવામાં વ્યવસ્થાપિત હતા, પરંતુ માત્ર એવા કિસ્સામાં જ્યારે પેરામેશિયમની ઘનતા ખોરાકની અછત (બેક્ટેરિયા) દ્વારા મર્યાદિત હતી અને સાંસ્કૃતિક પ્રવાહીમાં મિથાઈલસેલ્યુલોઝ ઉમેરવામાં આવ્યું હતું - એક પદાર્થ જે જનસંખ્યાને ઘટાડે છે. શિકારી અને શિકાર બંનેની હિલચાલની ગતિ અને તેથી તેમની સંભવિત બેઠકોની આવર્તન ઘટાડે છે. તે પણ બહાર આવ્યું છે કે જો પ્રાયોગિક વહાણની માત્રામાં વધારો કરવામાં આવે તો શિકારી અને શિકાર વચ્ચેના ઓસિલેશનને પ્રાપ્ત કરવું વધુ સરળ છે, જો કે આ કિસ્સામાં શિકારના ખોરાકની મર્યાદાની સ્થિતિ પણ જરૂરી છે. જો ઓસીલેટરી મોડમાં શિકારી અને શિકારની પ્રણાલીમાં વધારાનો ખોરાક ઉમેરવામાં આવ્યો હતો, તો પ્રતિક્રિયા એ શિકારની સંખ્યામાં ઝડપી વધારો હતો, ત્યારબાદ શિકારીની સંખ્યામાં વધારો થયો હતો, જે બદલામાં સંપૂર્ણ સંહાર તરફ દોરી જાય છે. શિકારની વસ્તી.
લોટકા અને વોલ્ટેરા મોડેલોએ શિકારી-શિકાર પ્રણાલીના અન્ય સંખ્યાબંધ વાસ્તવિક મોડેલોના વિકાસ માટે પ્રેરણા તરીકે સેવા આપી હતી. ખાસ કરીને, એકદમ સરળ ગ્રાફિકલ મોડલ જે વિવિધ શિકાર આઇસોક્લાઇન્સના ગુણોત્તરનું વિશ્લેષણ કરે છે શિકારી, એમ. રોસેન્ઝવેઇગ અને આર. મેકઆર્થર (રોસેન્ઝવેઇગ, મેકઆર્થર) દ્વારા પ્રસ્તાવિત કરવામાં આવ્યો હતો. આ લેખકો અનુસાર, સ્થિર ( = સતત) શિકારી અને શિકારની ઘનતાના સંકલન અક્ષોમાં શિકારની સંખ્યાને બહિર્મુખ આઇસોક્લાઇન (ફિગ. 7, એ) ના સ્વરૂપમાં રજૂ કરી શકાય છે. એક બિંદુ કે જેના પર આઇસોકલાઇન શિકારની ઘનતા રેખા સાથે છેદે છે તે લઘુત્તમ અનુમતિપાત્ર શિકારની ઘનતાને અનુરૂપ છે (નીચેની વસ્તી લુપ્ત થવાના ખૂબ ઊંચા જોખમમાં છે, જો માત્ર નર અને માદા વચ્ચે મીટિંગની ઓછી આવર્તનને કારણે), અને બીજો બિંદુ ઉપલબ્ધ ખોરાકની માત્રા અથવા શિકારની વર્તણૂકીય લાક્ષણિકતાઓ દ્વારા નિર્ધારિત મહત્તમને અનુરૂપ છે. ચાલો આપણે ભારપૂર્વક જણાવીએ કે આપણે હજી પણ શિકારીની ગેરહાજરીમાં લઘુત્તમ અને મહત્તમ ઘનતા વિશે વાત કરી રહ્યા છીએ. જ્યારે શિકારી દેખાય છે અને તેની સંખ્યામાં વધારો થાય છે, ત્યારે લઘુત્તમ અનુમતિપાત્ર શિકારની ઘનતા દેખીતી રીતે વધારે હોવી જોઈએ, અને મહત્તમ - ઓછી. શિકારની ઘનતાનું દરેક મૂલ્ય ચોક્કસ શિકારી ઘનતાને અનુરૂપ હોવું જોઈએ કે જેના પર શિકારની વસ્તીની સ્થિરતા પ્રાપ્ત થાય છે. આવા બિંદુઓનું ભૌમિતિક સ્થાન શિકારી અને શિકારના ઘનતા કોઓર્ડિનેટ્સમાં શિકાર આઇસોક્લાઇન છે. શિકારની ઘનતામાં ફેરફારની દિશા દર્શાવતા વેક્ટર્સ (આડા લક્ષી) આઇસોક્લાઇનની વિવિધ બાજુઓ પર અલગ અલગ દિશાઓ ધરાવે છે (ફિગ. 7a).

ચોખા. 7. શિકાર (a) અને શિકારી (b) ની સ્થિર વસ્તીના આઇસોક્લિન્સ.
શિકારી માટે, તેની વસ્તીની સ્થિર સ્થિતિને અનુરૂપ, સમાન કોઓર્ડિનેટ્સમાં એક આઇસોક્લાઇન પણ બનાવવામાં આવી હતી. શિકારી વિપુલતામાં પરિવર્તનની દિશા દર્શાવતા વેક્ટર્સ આઇસોક્લાઇનની કઈ બાજુ પર સ્થિત છે તેના આધારે ઉપર અથવા નીચે દિશામાન થાય છે. ફિગમાં બતાવેલ શિકારી આઇસોક્લાઇનનો આકાર. 7, bનક્કી કરવામાં આવે છે, પ્રથમ, શિકારની ચોક્કસ લઘુત્તમ ઘનતાની હાજરી દ્વારા, શિકારીની વસ્તી જાળવવા માટે પૂરતું છે (શિકારની ઓછી ઘનતા પર, શિકારી તેની સંખ્યામાં વધારો કરી શકતો નથી), અને બીજું, તેની હાજરી દ્વારા શિકારીની ચોક્કસ મહત્તમ ઘનતા, જેની ઉપર સંખ્યા પીડિતોની વિપુલતાથી સ્વતંત્ર રીતે ઘટશે.

ચોખા. 8. શિકારી-શિકાર પ્રણાલીમાં ઓસીલેટરી મોડ્સનો ઉદભવ શિકારી અને શિકારના આઇસોક્લાઇન્સના સ્થાનના આધારે.
જ્યારે શિકાર અને શિકારી આઇસોક્લાઇનને એક ગ્રાફ પર જોડવામાં આવે છે, ત્યારે ત્રણ અલગ અલગ વિકલ્પો શક્ય છે (ફિગ. 8). જો શિકારી આઇસોક્લાઇન શિકારની આઇસોક્લાઇનને તે જગ્યાએ છેદે છે જ્યાં તે પહેલેથી જ ઘટી રહ્યો છે (શિકારની ઊંચી ઘનતા પર), તો શિકારી અને શિકારની વિપુલતામાં ફેરફાર દર્શાવતા વેક્ટર અંદરની તરફ વળી જતા માર્ગ બનાવે છે, જે વિપુલતામાં ભીનાશ વધઘટને અનુરૂપ છે. શિકાર અને શિકારી (ફિગ. 8, એ). એવા કિસ્સામાં જ્યારે શિકારી આઇસોક્લાઇન તેના ચડતા ભાગમાં શિકારના આઇસોક્લાઇનને છેદે છે (એટલે કે, શિકારની ઘનતાના નીચા મૂલ્યોના ક્ષેત્રમાં), વેક્ટર એક અનવાઈન્ડિંગ ટ્રેજેક્ટોરી બનાવે છે, અને શિકારી અને શિકારની સંખ્યામાં વધઘટ વધવા સાથે થાય છે. કંપનવિસ્તાર, અનુક્રમે (ફિગ. 8, b).જો શિકારી આઇસોક્લાઇન શિકારના આઇસોક્લાઇનને તેની ટોચના પ્રદેશમાં છેદે છે, તો વેક્ટર રચાય છે દુષ્ટ વર્તુળ, અને શિકાર અને શિકારીની સંખ્યામાં વધઘટ સ્થિર કંપનવિસ્તાર અને સમયગાળા દ્વારા વર્ગીકૃત થયેલ છે (ફિગ. 8, વી).
બીજા શબ્દોમાં કહીએ તો, ભીના થયેલા ઓસિલેશન એવી પરિસ્થિતિને અનુરૂપ છે કે જેમાં શિકારી શિકારની વસ્તી પર નોંધપાત્ર અસર કરે છે જે માત્ર ખૂબ જ ઊંચી ઘનતા (મહત્તમની નજીક) સુધી પહોંચે છે, અને જ્યારે શિકારી સક્ષમ હોય છે ત્યારે વધતા કંપનવિસ્તારના ઓસિલેશન થાય છે. શિકારની ઓછી ઘનતા સાથે પણ ઝડપથી તેની સંખ્યા વધારવી અને તેથી તેનો ઝડપથી નાશ કરવાની રીત. તેમના મોડેલના અન્ય સંસ્કરણોમાં, પોસેન્ઝવેઇગ અને મેકઆર્થરે બતાવ્યું કે શિકારી-શિકારના ઓસિલેશનને "આશ્રય" રજૂ કરીને સ્થિર કરી શકાય છે, એટલે કે. સૂચવે છે કે ઓછી શિકારની ગીચતાવાળા વિસ્તારમાં, એક એવો વિસ્તાર છે જ્યાં શિકારની સંખ્યાને ધ્યાનમાં લીધા વિના શિકારની વિપુલતા વધે છે.
તેમની જટિલતાને વધારીને મોડેલોને વધુ વાસ્તવિક બનાવવાની ઇચ્છા માત્ર સિદ્ધાંતવાદીઓના કાર્યોમાં જ પ્રગટ થાય છે, પણ પ્રયોગકર્તાઓ ખાસ કરીને, હફકર દ્વારા રસપ્રદ પરિણામો પ્રાપ્ત થયા હતા, જેમણે નાના શાકાહારી જીવાતના ઉદાહરણનો ઉપયોગ કરીને ઓસીલેટરી મોડમાં શિકારી અને શિકારની સહઅસ્તિત્વની શક્યતા દર્શાવી હતી. ઇઓટેટ્રાનીચસ સેક્સમેક્યુલેટસઅને એક શિકારી ટિક તેના પર હુમલો કરે છે ટાઇફલોડ્રોમસ પ્રાસંગિક. છિદ્રોવાળી ટ્રે પર મૂકવામાં આવેલા નારંગીનો ઉપયોગ શાકાહારી જીવાત માટે ખોરાક તરીકે થતો હતો. મૂળ સંસ્કરણમાં એક ટ્રે પર 40 છિદ્રો હતા, જેમાંથી કેટલાકમાં નારંગી (આંશિક રીતે છાલેલા) અને અન્યમાં રબરના બોલ હતા. બગાઇની બંને પ્રજાતિઓ પાર્થેનોજેનેટિક રીતે ખૂબ જ ઝડપથી પ્રજનન કરે છે, અને તેથી તેમની વસ્તી ગતિશીલતાની પ્રકૃતિ પ્રમાણમાં ટૂંકા ગાળામાં પ્રગટ થઈ શકે છે. એક ટ્રે પર 20 માદા શાકાહારી જીવાત મૂક્યા પછી, હફેકરે જોયું ઝડપી વૃદ્ધિતેની વસ્તી, જે 5-8 હજાર વ્યક્તિઓ (એક નારંગી દીઠ) ના સ્તરે સ્થિર થઈ છે. જો શિકારની વધતી જતી વસ્તીમાં શિકારીની સંખ્યાબંધ વ્યક્તિઓ ઉમેરવામાં આવે, તો પછીની વસ્તી ઝડપથી કદમાં વધી ગઈ અને જ્યારે તમામ પીડિતો ખાઈ ગયા ત્યારે મૃત્યુ પામ્યા.
ટ્રેના કદને 120 છિદ્રો સુધી વધારીને, જેમાં વ્યક્તિગત નારંગી ઘણા રબરના દડાઓમાં અવ્યવસ્થિત રીતે પથરાયેલા હતા, હફકર શિકારી અને શિકારના સહઅસ્તિત્વને લંબાવવામાં સક્ષમ હતા. મહત્વની ભૂમિકાશિકારી અને શિકાર વચ્ચેની ક્રિયાપ્રતિક્રિયામાં, જેમ તે બહાર આવ્યું છે, તેમના વિખેરવાના દરનો ગુણોત્તર ભૂમિકા ભજવે છે. હફકરે સૂચવ્યું કે શિકારની હિલચાલને સરળ બનાવીને અને શિકારીની હિલચાલને વધુ મુશ્કેલ બનાવીને, તેમના સહઅસ્તિત્વનો સમય વધારી શકાય છે. આ કરવા માટે, 120 છિદ્રોની ટ્રે પર, 6 નારંગીને અવ્યવસ્થિત રીતે રબરના દડાઓ વચ્ચે મૂકવામાં આવ્યા હતા, અને નારંગી સાથેના છિદ્રોની આસપાસ, વેસેલિન અવરોધો બનાવવામાં આવ્યા હતા જેથી શિકારીને ફેલાતો અટકાવી શકાય, અને શિકારની પતાવટને સરળ બનાવવા માટે, લાકડાના ડટ્ટા હતા. ટ્રે પર મજબૂત, શાકાહારી જીવાત માટે એક પ્રકારનાં "ટેકઓફ પેડ્સ" તરીકે સેવા આપે છે (હકીકત એ છે કે આ પ્રજાતિ પાતળા થ્રેડો ઉત્પન્ન કરે છે અને તેની મદદથી હવામાં તરતી શકે છે, પવન સાથે ફેલાય છે). આવા જટિલ વસવાટમાં, શિકારી અને શિકાર 8 મહિના સુધી સહઅસ્તિત્વ ધરાવે છે, જે વસ્તીના વધઘટના ત્રણ સંપૂર્ણ ચક્ર દર્શાવે છે. આ સહઅસ્તિત્વ માટેની સૌથી મહત્વની શરતો નીચે મુજબ છે: રહેઠાણની વિજાતીયતા (તેમાં રહેવા માટે યોગ્ય અને અયોગ્ય વિસ્તારોની હાજરીના અર્થમાં), તેમજ શિકાર અને શિકારીના સ્થળાંતરની શક્યતા (જાળવણી કરતી વખતે) આ પ્રક્રિયાની ઝડપમાં શિકારનો થોડો ફાયદો). બીજા શબ્દોમાં કહીએ તો, શિકારી શિકારના એક અથવા બીજા સ્થાનિક સંચયને સંપૂર્ણપણે ખતમ કરી શકે છે, પરંતુ કેટલાક શિકાર વ્યક્તિઓ પાસે સ્થળાંતર કરવાનો સમય હોય છે અને અન્ય સ્થાનિક સંચયને જન્મ આપે છે. વહેલા અથવા પછીથી, શિકારી નવા સ્થાનિક સંચયમાં પણ પહોંચશે, પરંતુ તે દરમિયાન શિકારને અન્ય સ્થળોએ સ્થાયી થવાનો સમય મળશે (જેમાં તે પહેલાં રહેતો હતો, પરંતુ પછી તેને ખતમ કરવામાં આવ્યો હતો).
હફેકરે પ્રયોગમાં જે અવલોકન કર્યું તેના જેવું જ કંઈક કુદરતી પરિસ્થિતિઓમાં પણ થાય છે. ઉદાહરણ તરીકે, કેક્ટસ મોથ બટરફ્લાય (કેક્ટોબ્લાસ્ટિસ કેક્ટોરમ), ઑસ્ટ્રેલિયા લાવવામાં આવ્યા, કાંટાદાર પિઅર કેક્ટસની સંખ્યામાં નોંધપાત્ર ઘટાડો કર્યો, પરંતુ તેનો સંપૂર્ણ નાશ કર્યો નહીં કારણ કે કેક્ટસ થોડી ઝડપથી ફેલાય છે. તે સ્થળોએ જ્યાં કાંટાદાર પિઅર સંપૂર્ણપણે નાશ પામે છે, શલભ થવાનું બંધ કરે છે. તેથી, જ્યારે થોડા સમય પછી કાંટાદાર પિઅર અહીં ફરીથી પ્રવેશ કરે છે, ત્યારે તે જીવાત દ્વારા નાશ થવાના જોખમ વિના ચોક્કસ સમયગાળા માટે વિકાસ કરી શકે છે. જોકે, સમય જતાં, જીવાત અહીં ફરીથી દેખાય છે અને ઝડપથી ગુણાકાર કરીને કાંટાદાર પિઅરનો નાશ કરે છે.
શિકારી-શિકારની વધઘટ વિશે બોલતા, કેનેડામાં સસલા અને લિંક્સની સંખ્યામાં ચક્રીય ફેરફારોનો ઉલ્લેખ કરવામાં નિષ્ફળ ન જઈ શકાય, જે 18મી સદીના અંતથી લઈને શરૂઆત સુધી હડસન બે કંપની દ્વારા ફર કાપણીના આંકડાઓના આધારે શોધી કાઢવામાં આવ્યા હતા. 20 મી સદી. આ ઉદાહરણને ઘણીવાર શિકારી-શિકારના ઓસિલેશનના ક્લાસિક ચિત્ર તરીકે જોવામાં આવે છે, જો કે હકીકતમાં આપણે શિકારની વસ્તી (સસલું) ની વૃદ્ધિને પગલે શિકારી (લિન્ક્સ) ની વસ્તી વૃદ્ધિ જોયે છે. દરેક વધ્યા પછી સસલાની સંખ્યામાં ઘટાડો થવા માટે, તે ફક્ત શિકારીઓના વધતા દબાણ દ્વારા સમજાવી શકાતું નથી, પરંતુ તે અન્ય પરિબળો સાથે સંકળાયેલું હતું, દેખીતી રીતે, મુખ્યત્વે શિયાળામાં ખોરાકની અછત. આ નિષ્કર્ષ પર પહોંચ્યો હતો, ખાસ કરીને, એમ. ગિલ્પિન દ્વારા, જેમણે આ ડેટા ક્લાસિકલ લોટકા-વોલ્ટેરા મોડેલ દ્વારા વર્ણવી શકાય કે કેમ તે તપાસવાનો પ્રયાસ કર્યો હતો. પરીક્ષણ પરિણામો દર્શાવે છે કે મોડેલ માટે કોઈ સંતોષકારક ફિટ નથી, પરંતુ વિચિત્ર રીતે, જો શિકારી અને શિકારની અદલાબદલી કરવામાં આવે તો તે વધુ સારું બને છે, એટલે કે. લિંક્સને "શિકાર" તરીકે અને સસલાને "શિકારી" તરીકે અર્થઘટન કર્યું. આવી જ પરિસ્થિતિ લેખના રમૂજી શીર્ષકમાં પ્રતિબિંબિત થાય છે ("શું સસલા લિંક્સ ખાય છે?"), જે અનિવાર્યપણે ખૂબ ગંભીર છે અને ગંભીર વૈજ્ઞાનિક જર્નલમાં પ્રકાશિત થાય છે.